|
|
(Poniższego układu nie stosowałem jeszcze do sterowania wiatrakiem, zbudowałem jeden taki układ, który prawidłowo sterował silnikiem 12VDC)
Budując np. wiatrak należy rozwiązać problem zmieniającej się prędkości obrotowej pod wpływem zmiennej prędkości wiatru oraz nawet całkowitego zatrzymania przy bardzo silnych wiatrach. Różnego rodzaju mechaniczne regulatory nie zapewniają takiej dokładności w regulacji prędkości obrotowej, jak regulacja elektroniczna. Czytając artykuł John'a Iovine'a pt.: BUDUJEMY ELEKTRONICZNY NEURON w grudniowym numerze "Świata Nauki" z 1994 r. w cyklu "Naukowiec Amator" przedstawiający opis prostego układu elektronicznego, który obraca się w kierunku poruszającego się źródła światła (na przykład Słońca) dzięki silniczkowi, postanowiłem zbudować coś prostego, ale i dobrze spełniającego swoje zadanie. Do budowy poniższego układu przydały mi się bardzo wskazówki podane w cyklu artykułów "Klocki elektroniczne" drukowanych w piśmie "Elektronika dla Wszystkich" (od nr 1/96), z których część informacji zamieszczam poniżej, mogą one być przydatne dla osób początkujących w dziedzinie elektroniki (do których sam się zaliczam).
W układzie wykorzystane są dwa wzmacniacze operacyjne typu 741. Układ taki można kupić w postaci kostki z 8 nóżkami (8 pin).
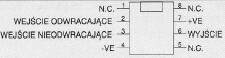
Wyprowadzenia układu:
7 - zasilanie (+)
4 - masa (-)
6 - wyjście
2 - wejście odwracające
3 - wejście nieodwracające
1, 5, 8 - mają inne zastosowania
(w opisywanym układzie nie będą potrzebne);
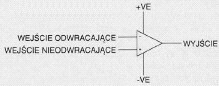
poniżej rysunek uproszczony stosowany
w schematach elektrycznych
Wzmacniacz operacyjny 741 będzie tu pracował jako komparator napięcia, czyli będzie je porównywał - na jedno z wejść np. odwracające 2 podawane będzie napięcie odniesienia, a na drugie (nieodwracające - 3) napięcie porównywane. Jeśli napięcie porównywane będzie niższe lub wyższe od napięcia odniesienia, to stosowanie do tego na wyjściu uzyskamy stan niski lub wysoki (bliski 0V - ok. 1-2V lub napięciu zasilającemu - niższe od niego o ok. 1-2V) - rys. poniżej.
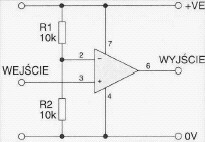
Wzmacniacz pracujący jako przełącznik.
Przy zastosowaniu rezystorów jak na powyższym rysunku (mamy tu dzielnik napięcia) napięcie odniesienia równa się połowie napięcia zasilającego - ich wartość można zmieniać w zależności od potrzeby. Na rysunku mamy układ nieodwracający, jednak w razie potrzeby można zamienić końcówki 2 i 3 uzyskując układ odwracający, tzn. jeśli napięcie porównywane jest niższe od napięcia odniesienia mamy stan wysoki, jeśli wyższe stan niski.
Układ
przełączający
przedstawiany wyżej działa poprawnie, jednak w wielu zastosowaniach
może być
przydatne zmniejszenie jego czułości, np. załóżmy że podawane na
wejście
napięcie jest proporcjonalne do temperatury, układ porównuje je z
napięciem
odniesienia (nastawioną temp.) i odpowiednio do tego załącza (przez np.
przekaźnik sterowany stanem na wyjściu wzmacniacza) grzejnik
elektryczny. Jeśli układ byłby
bardzo czuły to w krytycznym punkcie bardzo często by włączał i
wyłączał
grzejnik. Załóżmy że nastawiona temp. to 20ºC. Najlepiej aby można było
ustawić dokładność np. +-1º. Układ taki pracowałby następująco -
gdy temp. spadnie poniżej 19ºC układ załącza grzejnik, aż do momentu w
którym osiągnie wartość 21ºC - wtedy grzejnik wyłącza się - dzięki
temu załączanie i wyłączanie grzejnika będzie przebiegać znacznie
rzadziej.
Wzmacniacz 741 można też wykorzystać do budowy układu załączającego
światło
o zmroku, lecz tu też należy mieć możliwość zmniejszania jego czułości,
inaczej w krytycznym punkcie światło mogłoby mrugać.
Regulację czułości układu można zrealizować przez wprowadzenie wywołującego histerezę dodatniego sprzężenia zwrotnego. Można to zrobić dodając dwa rezystory R3 (wejściowy) i R4 (rezystor sprzężenia zwrotnego) - rys. poniżej.
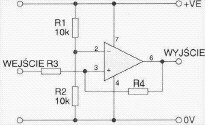
Układ taki
nazywa się przerzutnikiem Schmitta. Poniżej przedstawiono odwracający
przerzutnik Schmitta - zasada działania analogiczna, tylko stany na
wyjściu
przyjmują przeciwne wartości. W tym przypadku rezystor R3 można
pominąć.
Wartości rezystorów R3 i R4 najlepiej ustalić eksperymentalnie, można
na
początek przyjąć R3 = 10kc
i R4 jako potencjometr 100kW.
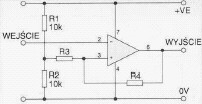
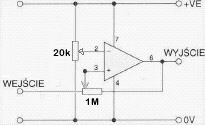
Na powyższych dwóch rysunkach można zauważyć, że rezystory R1 i R2, oraz R3 i R4 tworzą dzielniki napięcia. Zamiast tych 4 rezystorów można zastosować 2 potencjometry, najlepiej wieloobrotowe (tzw. helitrimy), dzięki którym można ustalać dokładnie różne wartości napięcia odniesienia i dodatniego sprzężenia zwrotnego. Sam eksperymentując z tymi układami zamiast rezystorów R1 i R2 zastosowałem helitrim 20kW, a zamiast R3 i R4 helitrim 1MW. Przy zasilaniu 12V zakres dokładności ustawień takiego układu wynosił od dziesiątych części V, do kilku V.
Mamy więc przerzutnik Schmitta. Można go wykorzystać do różnych celów, np.:
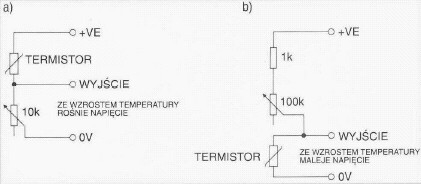
- załączanie np. grzejnika lub wentylatora w zależności od temperatury; przy czy musimy przekształcić temperaturę na sygnał w postaci napięcia, można to zrobić wykorzystując termistor (rezystor zmieniający swoją rezystancję w zależności od temperatury); sygnał ten podajemy na wejście naszego przerzutnika
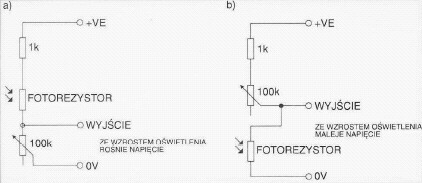
- włączanie oświetlenia o zmroku, tu można wykorzystać fotorezystory
- można konstruować różnego rodzaju czujniki, praktycznie wszystko zależy tylko od naszej pomysłowości, np. prędkość obrotową można przekształcić na napięcie wykorzystując jakąś małą prądnicę (tachometr, dynamo rowerowe - w przypadku dynam prąd zmienny należy najpierw wyprostować); można podłączyć taki układ do wiatromierza, może on wtedy np. włączać wiatrak po przekroczeniu minimalnego wiatru lub go wyłączać przy zbyt silnym wietrze.
Na wyjściu z przerzutnika podłączamy używając np. tranzystorów MOFSET, przekaźników, różnego rodzaju urządzenia (silniki, grzałki, wentylatory, żarówki, inne układy itp.).
Wykorzystując
dwa takie przerzutniki Schmitta można zbudować układ sterujący pracą
wiatraka.
Najpierw należy uzyskać informacje o prędkości obrotowej wiatraka -
przekształcić ją na napięcie. Można tu wykorzystać napięcie z prądnicy,
jeśli nie jest regulowane od razu lub można w wale przekładni nawiercić
otwór,
w którym montujemy magnes z dynama rowerowego, a po zamontowaniu
stojana prąd
z niego prostujemy (używając klasycznego mostka diodowego, kondensatora
dużej
pojemności i rezystora). Można też wykorzystać jakiś gotowy tachometr,
stary wiatrak komputerowy lub zbudować czujnik elektroniczny. Napięcie
z tachometru będzie proporcjonalnie zmieniać się w zależności od zmian
prędkości
obrotowej. Najlepiej, aby dla obrotów nominalnych prądnicy wiatraka
napięcie
z tachometru było w przybliżeniu równe połowie napięcia zasilania
układu,
jeśli tak nie jest, to można wykorzystać dzielnik napięcia. Należy
także
wyznaczyć sobie charakterystykę tej małej prądnicy, w zależności od
prędkości
obrotowej.
Aby układ pracował prawidłowo powinien być zasilany przez stabilizator
napięcia,
tak aby napięcie odniesienia nie zmieniało się wraz z wahaniami
napięcia źródła
zasilania układu.
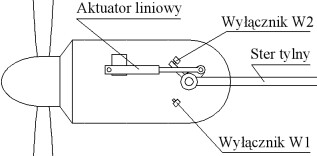
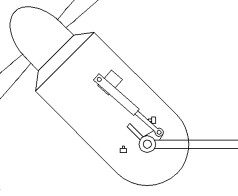
Jak wcześniej wspomniano układ składa się z dwóch kostek 741
- przerzutników Schmitta, z których jeden pracuje jako nieodwracający,
a
drugi jako odwracający. Włączają one lub wyłączają w odpowiedni sposób
połączone przekaźniki włączając w wiatraku prawe bądź lewe obroty
silnika aktuatora liniowego,
silnika śrubowego, dzięki czemu ulega zmianie kąt obrotu
płaszczyzny wirnika w stosunku do kierunku wiatru, a co za tym idzie w
stosunku do steru tylnego bądź kąt natarcia łopat.
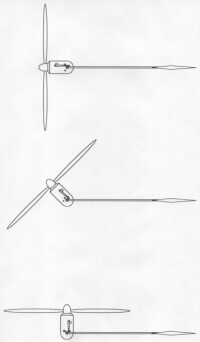
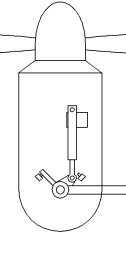
Wirnik może się odchylać w płaszczyźnie poziomej lub pionowej.
W silnikach 2, 3 i 4 łopatowych można zastosować regulację przez zmianę
kąta
natarcia łopaty. Silnik tu steruje kątem natarcia łopat umieszczonych w
odpowiedniej konstrukcji głowicy przez popychacz. W tym przypadku ster
tylny
jest umieszczony na stałe do korpusu głowicy.
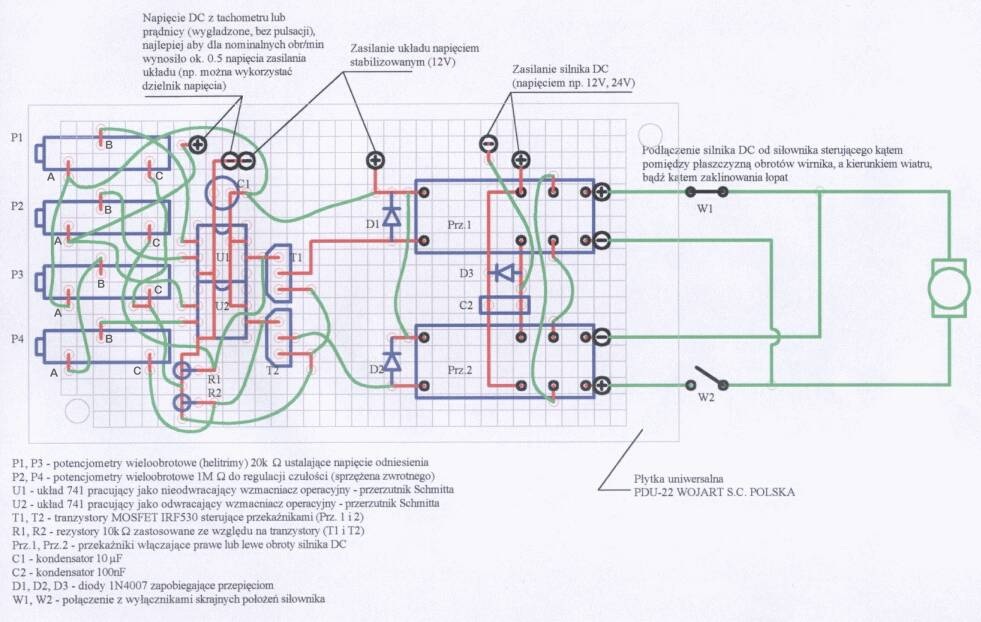
P1, P3 - potencjometry
wieloobrotowe (helitrimy) 20kW ustalające napięcie odniesienia
P2, P4 - potencjometry wieloobrotowe 1MW
do regulacji czułości (sprzężenia
zwrotnego)
U1 - układ 741 pracujący jako nieodwracający wzmacniacz operacyjny -
przerzutnik Schmitta
U2 - układ 741 pracujący jako odwracający wzmacniacz operacyjny -
przerzutnik Schmitta
T1, T2 - tranzystory MOSFET IRF530 sterujące przekaźnikami (Prz. 1 i 2)
- można
by tu spokojnie wykorzystać słabsze MOFSET-y, wykorzystałem IRF530 bo
takie
akurat miałem
R1, R2 - rezystory 10kW
zastosowane ze względu na tranzystory (T1
i T2)
Prz.1, Prz.2 - przekaźniki włączające prawe lub lewe obroty silnika DC
- ich sposób połączenia zapobiega podania prądu z dwóch jednocześnie
C1 - kondensator 10mF
C2 - kondensator 100nF
D1, D2, D3 - diody 1N4007 zapobiegające przepięciom
W1, W2 - wyłączniki skrajnych położeń siłownika, wiatraka
Poniższy
wykres prędkości obrotowej (czyli również napięcia tachometru)
przedstawia
górny zakres regulowanej prędkości obrotowej (potencjometrami można
ustawić
np. +-5% prędkości nominalnej). Układ U1 (wg1,
wd1) steruje górną granicą
zakresu tolerancji
obrotów (np. +5%), a U2 (wg2, wd2)
dolną (np. -5%). W związku z tym należy odpowiednio ustawić wartości
oporu na
potencjometrach, można to wstępnie zrobić jeszcze przed ich
wlutowaniem. Do
ustawienia układu przydatny będzie multimetr, woltomierz.
P1 i P3 (dzielniki
napięcia 20kW sterujące napięciem
odniesienia) tak
ustawiamy, aby na P1 napięcie (między nóżką B a masą) było nieco wyższe
od tego na P3 (też między nóżką B a masą). Na P2 i P4 (potencjometry 1MW
sterujące wartością tolerancji odchyłek od prędkości obrotowej
nominalnej)
ustawiamy minimalne wartości (np. ok. 10kW)
między
nóżkami A, B - im napięcie między nimi mniejsze, tym rezystancja
mniejsza
(między A i B), a co za tym idzie tolerancja mniejsza (jednak pod
warunkiem, że
różnice w napięciach odniesienia P1 i P3 (tzn. U1 i U2) są tak
ustawione, by
punkty wd1 i wg2 (czyli odpowiadające im napięcia
na P2 i P4 między B i masą podczas zmiany stanu
wysokiego na niski - wyłączaniu przekaźników - na wyjściu układów U1 i
U2) były blisko
siebie.
Zakres tolerancji obrotów nie może być zbyt mały (nastąpi bardzo częste
włączanie
silnika sterującego). Także prędkość posuwu aktuatora liniowego nie
może być
duża - obracający wirnik działa jak żyroskop i przy zbyt dużej
prędkości
kątowej wieżyczki względem danego kierunku wiatru łopatki mogłyby ulec
uszkodzeniu oraz (lub) ponieważ wirnik ma pewną bezwładność nie
zdążyłby
ustalić swej prędkości obrotowej dla danego położenia kątowego względem
prędkości wiatru, co spowodowałoby, że za mocno by się odchylił, tzn.
układ
w silniku aktuatora przy zmianie prędkości wiatru załączałby raz prawe,
petem lewe, znowu prawe obroty itd. aż do ustalenia po jakimś czasie
pewnego
położenia wirnika.
Należy tak dobrać przełożenie przekładni, aby prędkość obrotowa wokół
masztu
była mniejsza od 0.05 obr/sek.
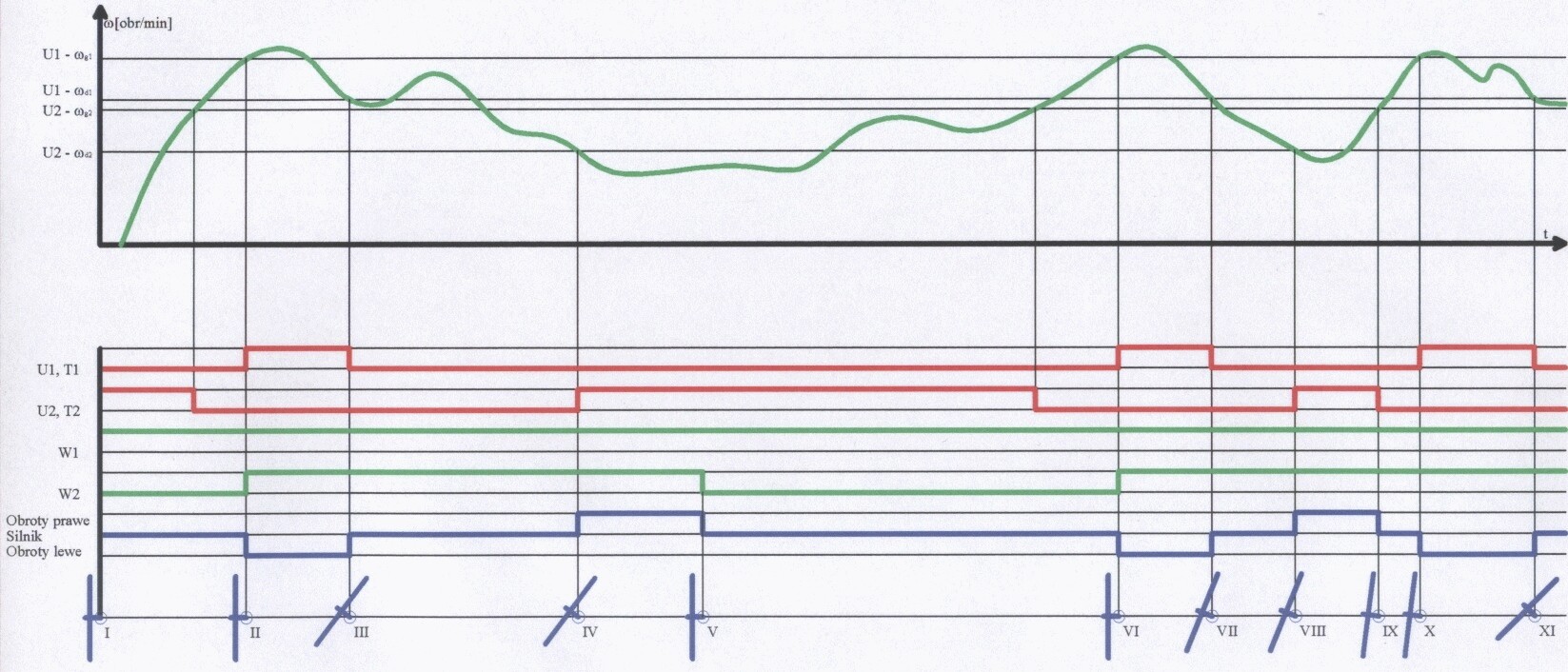
| I. | Na początku panuje prawie bezwietrzna pogoda. Oś wirnika wiatraka ustawione jest równolegle do osi ramienia steru tylnego i kierunku wiatru. Ponieważ obroty (napięcie z tachometru) jest niższe od wd2 (dolnej odchyłki, tolerancji od obrotów nominalnych) układ U2 załącza przekaźnik Prz.2, jednak silnik sterujący nie obraca się, ponieważ wirnik jest już w skrajnym położeniu i wyłącznik W2 przerwał obwód. Wiatr powoli zwiększa swą prędkość. Prz.2 jest włączony do momentu gdy obroty wirnika wiatraka przekroczą wg2 bliskie obrotom nominalnym. Prędkość wiatru, a co za tym idzie prędkość obrotowa i napięcie z tachometru dalej rośnie. Obroty przekraczają wd1, jednak na razie nic się nie dzieje (proszę pamiętać, że U1 pracuje jako układ nieodwracający, a U2 jako odwracający), dopóki obroty nie przekroczą wg1 (górnej odchyłki). |
| II. | Obroty przekraczają wg1, układ U1 załącza przekaźnik Prz.1 (W1 jest zamknięty). Załącza się silnik sterujący położeniem wiatraka względem kierunku wiatru (czyli także względem steru tylnego), co powoduje załączenie dotychczas otwartego wyłącznika W2. Załóżmy, że obroty silnika przy odchylaniu wiatraka od wiatru są lewe, a przy ustawianiu do wiatru prawe (to zależy jak podłączymy bieguny silnika i jak zamontowany jest aktuator). Włączają się więc lewe obroty, wiatrak zaczyna się odchylać od kierunku wiatru, co powoduje zmniejszanie prędkości obrotowej wirnika wiatraka. Wiatrak jest odchylany od kierunku wiatru aż do momentu gdy prędkość obrotowa obniży się do wd1. |
| III. | Gdy obroty spadną poniżej wd1 (czyli osiągną wartość bliską prędkości obr. nominalnej) U1 wyłącza Prz.1, tzn. również silnik sterujący. |
| IV. | Wiatrak jest ustawiony pod pewnym kątem do kierunku wiatru, którego prędkość dalej przez moment rośnie, jednak obroty nie przekraczają już wg1 (górnej odchyłki); ponieważ po chwili prędkość wiatru zaczyna spadać, to prędkość obrotowa zaczyna maleć do wd2. |
| V. | Prędkość obrotowa (jak również pr.
wiatru) dalej spada, aż poniżej wd2,
co powoduje załączenie przez U2 i Prz.2 prawych obrotów silnika
sterującego - wiatrak obraca się w kierunku wiatru. Jednak prędkość
wiatru dalej maleje, tak że wiatrak osiągając położenie do wiatru dalej
ma obroty poniżej dolnej odchyłki (wd2)
- przy ustawieniu do wiatru wyłącznik W2 przerywa obwód i silnik
nastawczy przestaje pracować, mimo włączenia Prz.2. Wiatr po pewnym czasie zaczyna zwiększać swą prędkość, a co za tym idzie, zwiększa się prędkość obrotowa wiatraka. Po przekroczeniu wg2 U2 wyłącza Prz.2. Prędkość dalej rośnie przekraczając w pewnym momencie wg1. |
| VI. | Po przekroczeniu górnego zakresu tolerancji zmian prędkości obrotowej wg1 układ U1 załącza przez Prz.1 lewe obroty silnika sterującego. Wiatrak zaczyna odchylać się od kierunku napływu wiatru, co zamyka wyłącznik W2 i jednocześnie zmniejsza prędkość obrotową do bliskiej nominalnej (wd1). |
| VII. | Prędkość wiatru zaczyna jednak maleć, więc obroty maleją, jednak póki nie przekroczą dolnej granicy tolerancji (wd2) wiatrak względem wiatru nie zmienia swej pozycji. |
| VIII. | Obroty spadają poniżej wd2. U2 załącza Prz.2 i silnik sterujący obraca wiatrak coraz bardziej do wiatru, aż do osiągnięcia obrotów bliskich nominalnym (wg2), kiedy to U2 zatrzymuje obracanie wiatraka, który jednak nie osiągnął jeszcze skrajnego położenia. |
| IX. | Wiatr znowu zwiększa swą prędkość więc prędkość obrotowa wiatraka rośnie. |
| X. | Po przekroczeniu górnej tolerancji (wg1) U1 załącza silnik sterujący i wiatrak zaczyna odchylać się od kierunku wiatru, aż do osiągnięcia obrotów bliskich nominalnym (wd1). |
| XI. | Obroty wiatraka i wiatru utrzymują się w miarę na stałym poziomie. Dalej w zależności od zmian prędkości wiatru, obciążenia wiatraka i odpowiadającym im zmianom prędkości obrotowej silnik sterujący będzie sterowany analogicznie, jak to przedstawiono w powyższych punktach. |
Powyższy układ został na razie zbudowany i przetestowany "na sucho", tzn. załączał on prawe lub lewe obroty silnika w zależności od podawanego napięcia na wejście.
Aby wyłączyć wiatrak - ustawić wirnik równolegle (bokiem) do kierunku wiatru - wystarczy podać sygnał wyższego napięcia na wejście z sygnałem z tachometru - może on być podawany przez jeszcze jeden przerzutnik Schmitta zamontowany w wiatromierzu - po przekroczeniu pewnej prędkości wiatru następowałoby wyłączenie wiatraka.
Układ nadaje się też do innych celów - można zrobić dzielnik napięcia: zasilanie - rezystor - fotorezystor - wyjście - fotorezystor - rezystor - masa. Fotorezystory powinny być umieszczone w przezroczystej obudowie z odpowiednią przesłoną między nimi (analogicznie jak układ z artykułu BUDUJEMY ELEKTRONICZNY NEURON). Jak dwa fotorezystory zostaną równomiernie oświetlone lub nastąpi brak światła (noc) to napięcie z dzielnika powinno być bliskie napięciu odniesienia, jeśli nierównomiernie oświetlenie to napięcie będzie wyższe lub niższe - prawe bądź lewe obroty. Można w ten sposób wykorzystać ten układ do sterowania lustrami, bateriami słonecznymi, kolektorami słonecznymi tak, aby były skierowane odpowiednio do słońca. Stosując dwa takie układy można sterować nachyleniem np. bateriami słonecznymi w pionie i poziomie.
|
|
||
|
|
|